The EVK1100 provides a joystick to design Human to Machine Interface for software developments.
Pinout
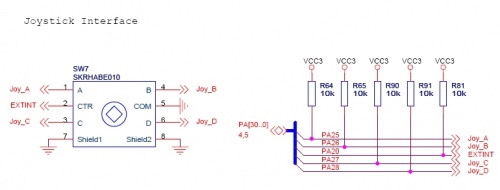
The joystick inputs are low level active1. The pinout is as follows:
| Joystick Pin | Joystick Direction | GPIO Name | Alternate function used |
|---|---|---|---|
| Joy_A | LEFT | PA 25 | SCAN_0 |
| Joy_B | UP | PA 26 | SCAN_1 |
| Joy_C | DOWN | PA 27 | SCAN_2 |
| Joy_D | RIGHT | PA 28 | SCAN_3 |
| EXTINT | PUSH | PA 20 | EXTINT_8 |
Figure 1. Hardware Schematic
Using Interrupts
In order to use the joystick, two ways are available:
-
Polling on the GPIO Port Value Register
-
Using GPIO interrupts to get state changes
Using GPIO interrupts need to:
- Register an interrupt handler for the input
- Set the GPIO control bit for the input
- Set the GPIO glitch filter bit for the input
- Configure the GPIO interrupt mask bit for the input to act either on rising edge, falling edge or input change2
- Set the GPIO interrupt enable bit for the input